
Automated Christmas Tree Decoration Robot
Project Overview
Developed an automated system for decorating Christmas trees using industrial robotics. The project combined 3D scanning, geometric path planning, and precise robot control to wrap garlands around a tree in a helical pattern.
Technical Implementation
- Designed custom roller fixture to rotate the tree
- Created 3D scanning setup to capture tree geometry.
- estimated the tree’s conical shape and generated motion path and robot trajectory.
- scavenged makeshift end effector from a 3D printer to hold the garland
Project Videos
📹 Final video
View Video on Linkedin
Project Images
 Tree Mounting and Scanning Setup
Tree Mounting and Scanning Setup
 Conical Path Generation
Conical Path Generation
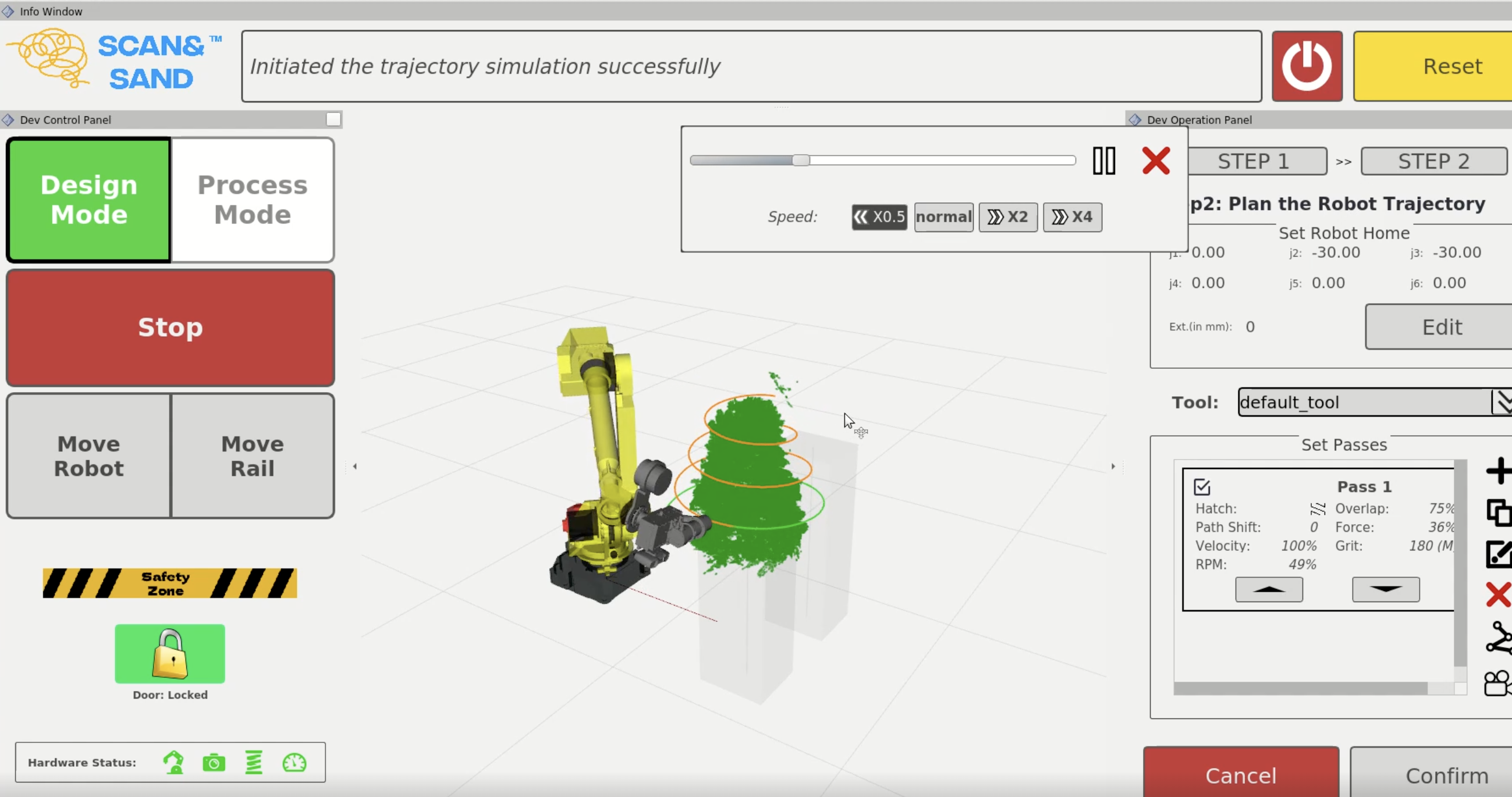 tree simulation
tree simulation