
Evolutionary Soft Robot Design
Project Overview
Created a physics-based simulation environment to evolve soft robots that learn efficient locomotion patterns. The project focused on using genetic algorithms to optimize the movement parameters of a snake-like robot constructed from masses and springs.
 Custom Physics Engine Simulation
Custom Physics Engine Simulation
Technical Implementation
- Built custom physics engine from scratch incorporating:
- Gravity simulation
- Damping effects
- Friction modeling
- Designed snake-like robot using mass-spring system
- Implemented evolutionary algorithm to optimize:
- Spring constants (K)
- Oscillation frequency (omega)
- Phase differences (phi)
Project Videos
📹 Evolution Process and Final Results

📹 Robot Movement Demonstration
📹 Final Demonstration
Project Images
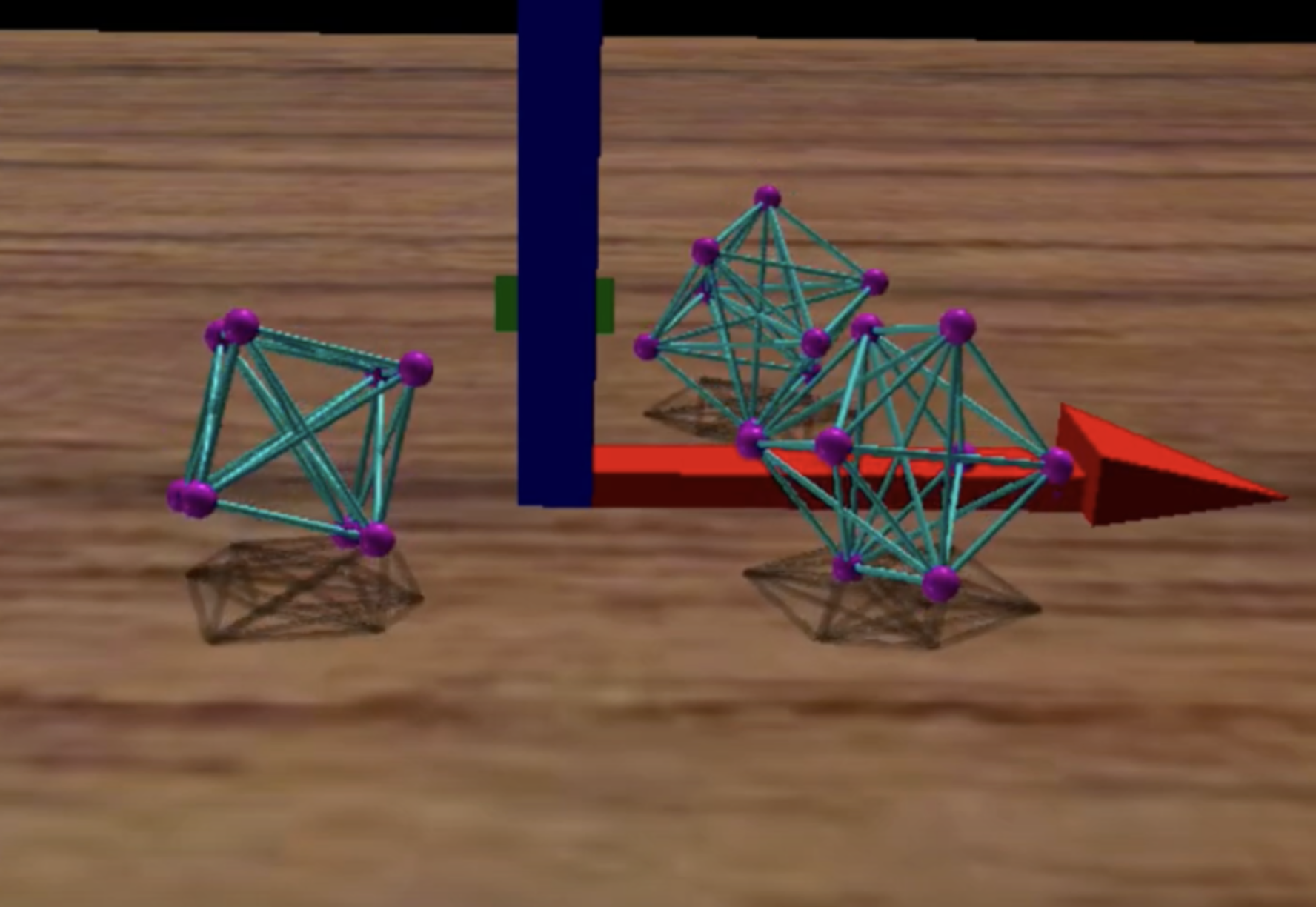
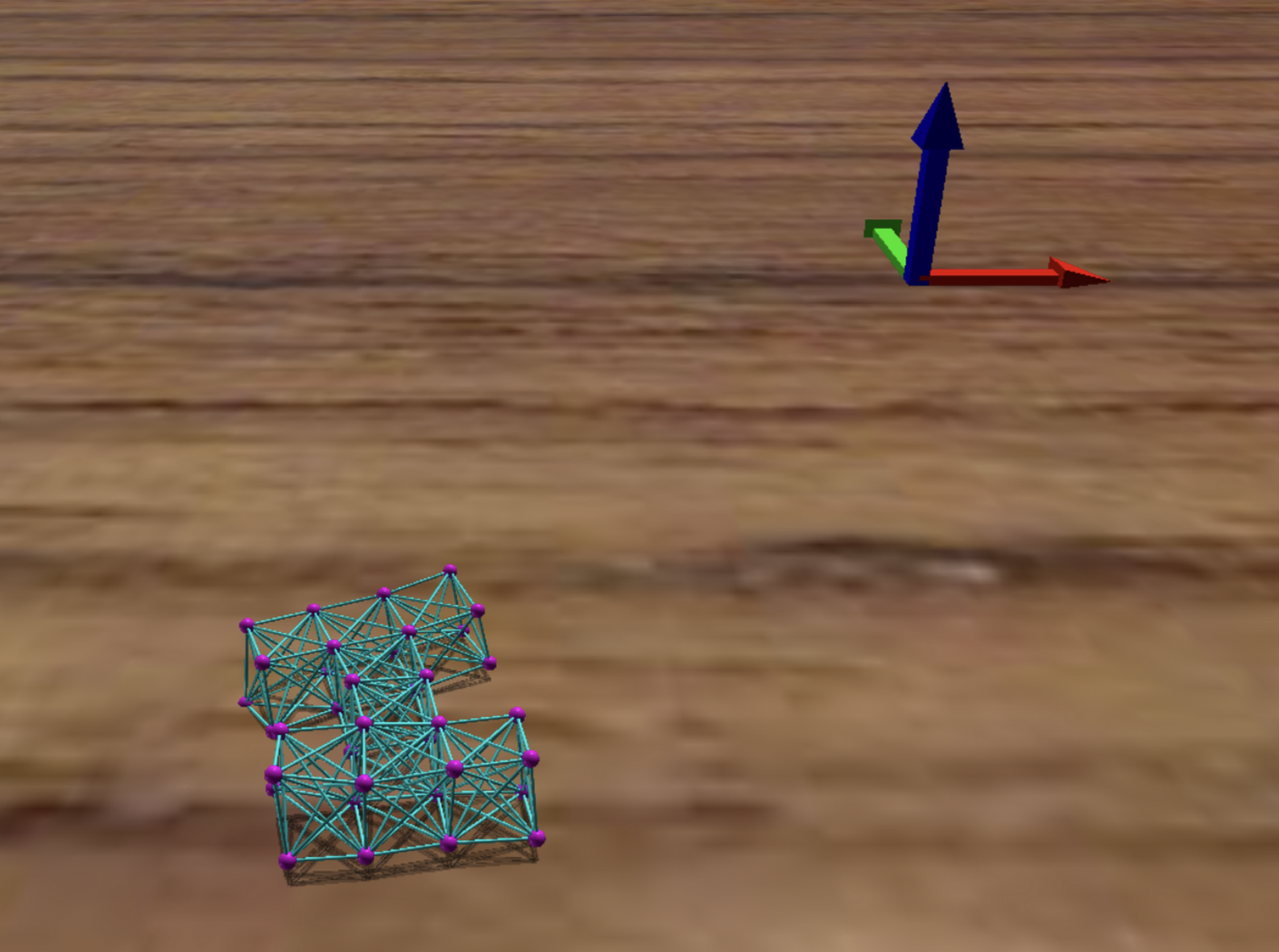
 Snake-like Robot Configuration with Mass-Spring System
Snake-like Robot Configuration with Mass-Spring System
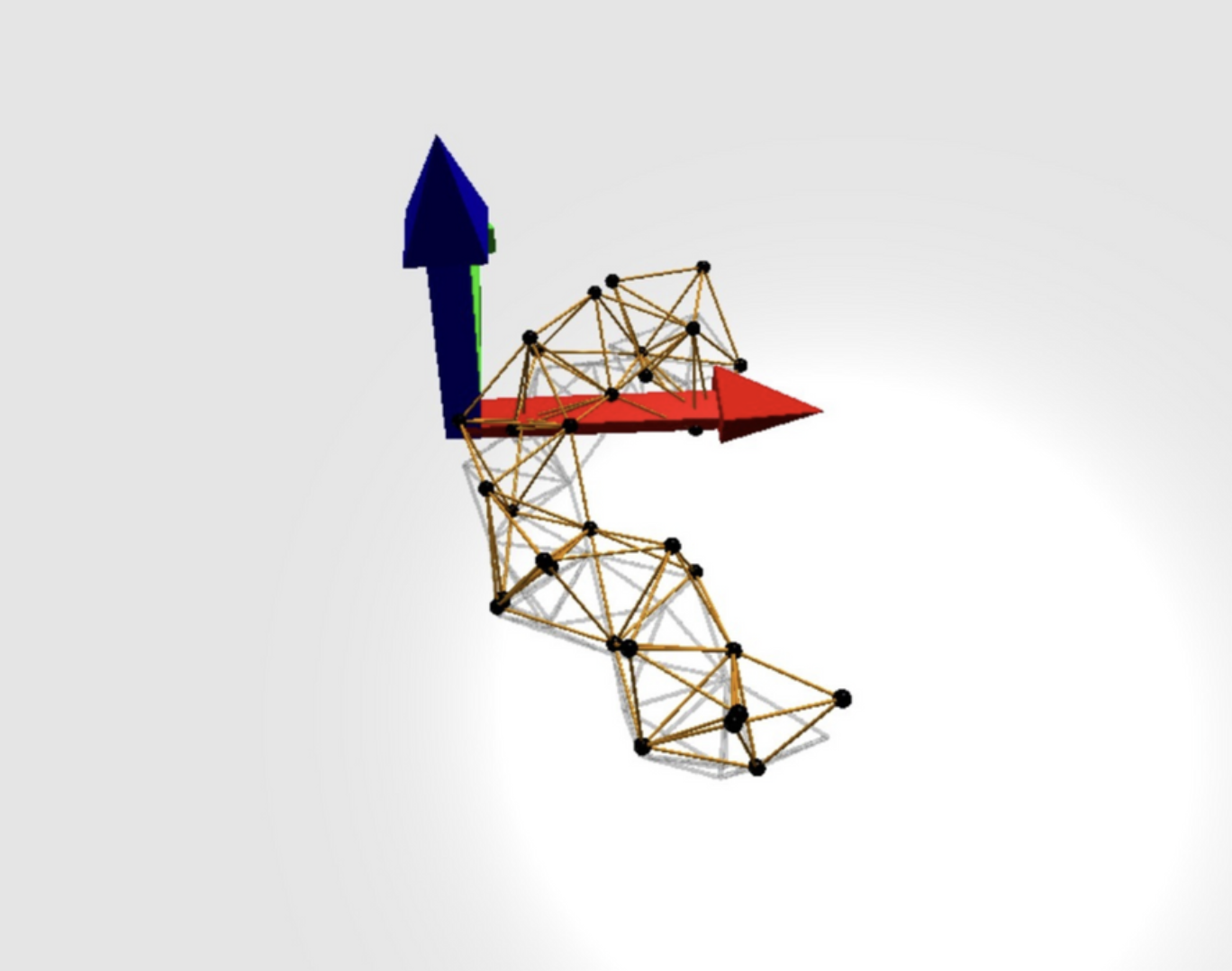
 Optimization Results Showing Movement Evolution
Optimization Results Showing Movement Evolution